Ex Gokin Fewture Shin Getter 1
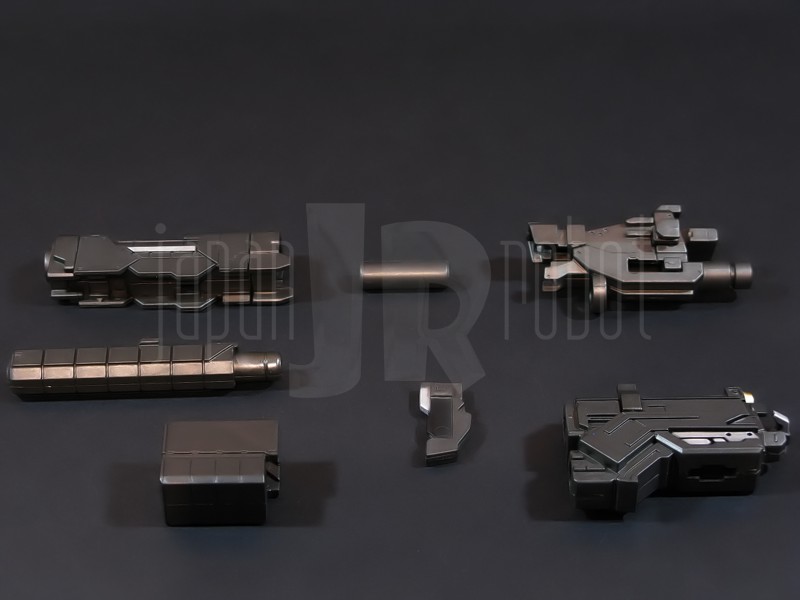
Come si estrae il modello e lo si soppesa se ne evince la abituale, estremamente lusinghiera e soddisfacente sensazione di pesantezza che caratterizza tutti i gokin di questa serie, già di per se indicativa di una composizione quasi integralmente in metallo. Fatta eccezione per testa, pugni, ginocchiere, dischi sulle braccia e giunture e ingranaggi a vista (vedi anche, spalle e gomiti), il nostro Shin Getter 1 è infatti totalmente in lega metallica, almeno per quanto riguarda le parti esposte. La politica adottata, anche per la strutturazione di questo modello così come per i precedenti Getter Fewture, è stata quella dello scheletro in plastica di sostegno ad un rivestimento esterno in zama, aspetto che non lascerebbe presagire niente di buono visti i problemi dei famigeratissimi predecessori, tanto criticati per falle più o meno clamorose (Getter 1 e Getter 2 in particolar modo) anche se in questo caso mi sento di essere più fiducioso visto l’uso di plastiche apparentemente più solide e di miglior qualità e l’impiego di viti (indicato dalla presenza di azzeccatissimi tappi ben visibili sulla schiena del robot) a solidificare la struttura del gokin. L’assemblaggio è estremamente semplice e rapido, è sufficiente applicare a pressione le lame sugli avambracci (ciascuna mobile in modo indipendente e regolata da uno snodo a sfera), la testa, il generatore getter, le due piastre pettorale e addominale, le ali e le due ginocchiere. Una volta assemblato il modello (completo di ali), ha un peso di 1060 grammi per un’altezza all’apice delle spalle di 26 cm scarsi che arriva ad un culmine di circa 43 cm alla punta delle ali se rivolte verso l’alto. La mobilità del modello è semplicemente eccezionale e garantita da un’infinità di punti di snodo che consentono anche le pose più estreme (vedi la possibilità di metterlo in ginocchio) a dispetto delle forme relativamente elaborate e della stazza decisamente imponente. L’avampiede è flessibile con movimento a scatto, le caviglie hanno discreta inclinazione e modesta rotazione lavorando in tal senso come articolazioni ad attrito e funzionando invece con sistema a scatto in estensione (peraltro buona). Le gambe ruotano leggermente lungo l’asse longitudinale (la sinistra del mio in realtà era bloccata ed ha necessitato di una piccola iniezione di lubrificante). Le ginocchia sono estremamente flessibili e regolate da snodi a scatto, il consiglio è quello di porre particolare attenzione ai rischi di sverniciatura nelle flessioni estreme, quando cioè la parte superiore della faccia posteriore della gamba rischia di andare in contatto con la parte bassa della faccia posteriore della coscia. L’articolazione dell’anca presenta ottime escursioni sia in abduzione che in flessione, agendo su ambo i piani con sistema a scatto. L’intero arto inferiore è peraltro abbondantemente intra ed extrarotabile all’altezza della coscia. Buoni i basculamenti laterali del torace, più limitati i movimenti di torsione, ad ogni modo occhio alle eventuali sverniciature della piastra pettorale nel caso di contatto col bacino, rischio da cui lo stesso foglio delle istruzioni mette in guardia. Le spalle sono ripiegabili in avanti ed estensibili posteriormente con sistema ad attrito mentre in rotazione (peraltro completa) ed in abduzione (pari a non più di 90 gradi) lo snodo si comporta come articolazione a scatto. Gli stessi inserti marroni sulle spalle sono mobili e ripiegabili medialmente a scatto. I gomiti, anch’essi a scatto, si flettono a circa 90 gradi, mentre gli avambracci sono liberamente ruotabili lungo il loro asse longitudinale. Addirittura i polsi (forse un po’ troppo esilini) sono a scatto e danno la possibilità di flessioni estreme alla mano. La testa è invece supportata da uno snodo a sfera che, oltre a consentire la rotazione completa a 360 gradi, permette ottimi movimenti di flessione ed estensione anche per effetto della mobilità della base di impianto. Nel complesso, oltre all’ottima posabilità, è confortante constatare la ricchezza di articolazioni a scatto, teoricamente in grado di garantire una maggiore tenuta in prospettiva futura, fondamentale per un gokin così pesante rispetto ai più semplici e col tempo logorabili snodi ad attrito. La qualità della verniciatura è nel complesso estremamente buona, comunque più alta, almeno in questo esemplare, rispetto alla media da me rilevata nei precedenti Ex Gokin. Se infatti si escludono alcuni ritocchi di vernice bianca sulla schiena (difetto peraltro lamentato anche in altre copie e da più di una persona) e piccole imperfezioni degli inserti verdi sulle gambe per il resto non ho dovuto registrare altri problemi di seppur minimo rilievo ma ho trovato anzi molto bella la tonalità di verde smeraldo tenuemente metallizzato impiegata e soprattutto stupende le sfumature del marrone metallizzato di ginocchia e spalle. Sempre rimanendo in tema di verniciatura non ho invece ben compreso, pur trovandola bella, la colorazione invecchiata in stile weathering delle varie paia di mani che però tendono a stonare su di un modello per il resto completamente “pulito”, ivi compresi gli accessori. Quanto all’estetica il giudizio per questi modelli più che per altri diventa difficile ed opinabile essendo strettamente legato al gusto personale ed indipendente dalle necessità di somiglianza ad una controparte animata in questo caso inesistente. Personalmente trovo che questo Shin Getter 1 abbia linee discretamente azzeccate seppur migliorabili, in particolar modo dalla cintura in giù, là dove avrei cioè auspicato un rapporto coscia-gamba più vicino al soggetto ispirante con gamba più massiccia e coscia più sottile a differenza dell’aspetto da simil culturista che una coscia eccessivamente ipertrofica, in associazione a una gamba troppo snella, tendono a conferirgli. Fa invece discutere riportando alla memoria alcuni mostri tipici della mitologia giapponese, la scelta di riprodurre sulla superficie dorsale le teste di Shin Getter 2 e 3, la prima a livello dorso-lombare, la seconda beh…. poco sopra al deretano. Sempre dal punto di vista estetico penso che delle due possibili mascherine quella con pupille sia la più indicata. Pur non essendo mai stato un estimatore dei robot con pupille (il robot è una macchina e per me tale deve restare) in questo caso, vuoi per l’aspetto decisamente più cattivo e demoniaco, vuoi per la commistione di caratteristiche organiche alla struttura robotica (vedi la conformazione corporea relativamente antropomorfa e soprattutto le ali con aspetto più organico che non meccanico) vedo la maschera dotata di pupille la più consigliabile tra le due in dotazione. Le ali (sempre che si tengano su), danno il meglio di se rivolte in alto più che allargate lateralmente anche se il limite principale (in ambo i casi) sono gli spazi a disposizione in vetrina viste le misure. Per rimanere in tema estetica chiudendolo definitivamente non posso invece esimermi dal condannare inappellabilmente l’oscena ubicazione di scritte in rilievo sull’interno coscia sia di sinistra (Taku Made in China) che di destra (Dyn A S/F M), inaccettabili (fatta eccezione al massimo per il solo marchio del Maestro) in un modello tanto costoso, evidentemente era troppo difficile pensare di stampigliarle sotto i piedi….. Nel complesso il bilancio delle caratteristiche più salienti del modello (quantità di metallo, posabilità, verniciatura ed estetica) parla quindi, per quanto constatato fino ad adesso, in modo estremamente positivo, per ora….. E’ infatti giunto il momento di affrontare l’aspetto più famigeratamente noto del nostro gokin, le ali! Già di base il loro packaging è poco rassicurante visto che come tale appare aggravare la comprovata fragilità di questi elementi sia perché gli alloggiamenti predisposti nella scatola, a fronte di dimensioni pletoriche, risultano paradossalmente ristretti (tanto che le punte, almeno nel mio caso, le ho ritrovate entrambe piantate nel polistirolo dell’alloggiamento stesso), sia perché la scatoletta contenente testa e ginocchiere tende a comprimere (perché riposta al di sopra di essa) l’ala destra. Sono in pvc semirigido e si compongono di 4 parti mobili tra loro articolate tramite due snodi, il più interno congiunge tra loro il primo (quello che si aggancia alla schiena del robot per intenderci) ed il secondo elemento mentre il più esterno articola contemporaneamente il secondo terzo e quarto elemento conferendo ad essi un movimento a ventaglio. La soluzione, quanto a versatilità e mobilità non sarebbe neanche così male consentendo l’esposizione delle ali con gradi variabili di inclinazione ed apertura in rapporto al gusto personale e anche la verniciatura è davvero molto bella con graduale sfumatura dal nero al viola dei patagi interdigitali. Sfortunatamente, però, i due snodi che ne dovrebbero sostenere la struttura sono qualcosa di più che fragile, tant’è che in molti casi sono già risultati rotti in una o entrambe le ali alla prima apertura della confezione. Anche il mio esemplare non è sfortunatamente sfuggito a questa regola per cui lo snodo esterno dell’ala destra, estremamente molle alla prima apertura dell’articolazione, ha fatto immediatamente crack al successivo movimento di chiusura. Anche lo snodo interno dell’ala sinistra presenta una piccola ma inquietante crepa sull’occhiello articolare del secondo elemento che, pur non minandone per adesso la solidità strutturale, potrebbe prendere con il tempo una piega poco piacevole….. I motivi di un tale disastro sono molteplici e da addebitarsi ad errori di assemblaggio (viti strinte eccessivamente a fondo e con vernice spesso ancora troppo fresca) in associazione all’impiego di materiali non propriamente di prima scelta. Ad ogni buon conto posso comunque affermare che nella sfortuna mi è andata anche abbastanza bene dal momento che la lunghezza del perno rotto è sufficiente a mantenere articolate tra loro le parti se riapplicata a pressione. Altro difetto lamentato da più di una persona è la diversa altezza delle due appendici una volta applicate dal momento che gli alloggiamenti a profilo ottagonale su cui si inseriscono gli innesti delle ali non sempre sono simmetrici, con il brutto risultato finale di un’ala posizionata in modo più o meno evidente più in alto dell’altra. La Getter machine eagle è forse l’oggetto esteticamente più valido di tutto il pacchetto, ha infatti una linea slanciata, dinamica, estremamente aggressiva e accattivante, veramente difficile fare di meglio. E’ quasi interamente in metallo fatta eccezione per i reattori e le ali (applicabili a pressione e mobili grazie a uno snodo a sfera) che invece sono in pvc. Ha un peso pari a 100 grammi per una lunghezza di 14 cm ed un’apertura alare di 11 cm. I suoi due elementi esterni sono ribaltabili lateralmente così da scoprire un alloggiamento che permettere l’aggancio delle ali del robot alla Getter machine stessa consentendone, volendo, l’esposizione anche in questa configurazione. Nel mio esemplare, alla prima apertura di uno degli elementi laterali si è staccato uno dei fermi che conferisce attrito al movimento e mantiene bloccato l’elemento stesso quando lo si ripiega. Poco male, l’ho riapplicato in sede anche se devo ammettere che adesso la tenuta non è il massimo e la parte risulta eccessivamente molle tendendo troppo facilmente ad inclinarsi, seppur di poco, lateralmente. Al posto delle due ali, a seconda dei gusti personali, possono essere applicate le lame degli avambracci pel robot, 3 per lato. Capitolo accessori: pressoché inutile il generatore getter (che una volta applicato rimane comunque nascosto dalla placca toracica), per il resto decisamente belli e d’effetto. (continua)
Mazingetter
(le foto sono state realizzate da SHIN)
page 1 - page 2 - page 3
|